供应
供应
产品详情
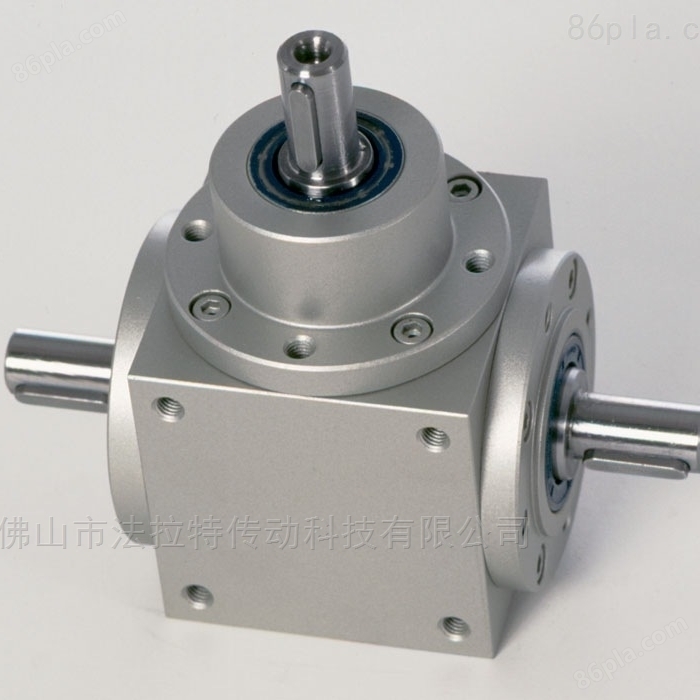
中国台湾原装法拉特FALATE高精度斜齿行星减速机,行星转向器行星换向器,行星转向器行星换向器,中国台湾FALATE法拉特大扭矩斜齿行星减速机,精密行星转向器,精密行星换向器 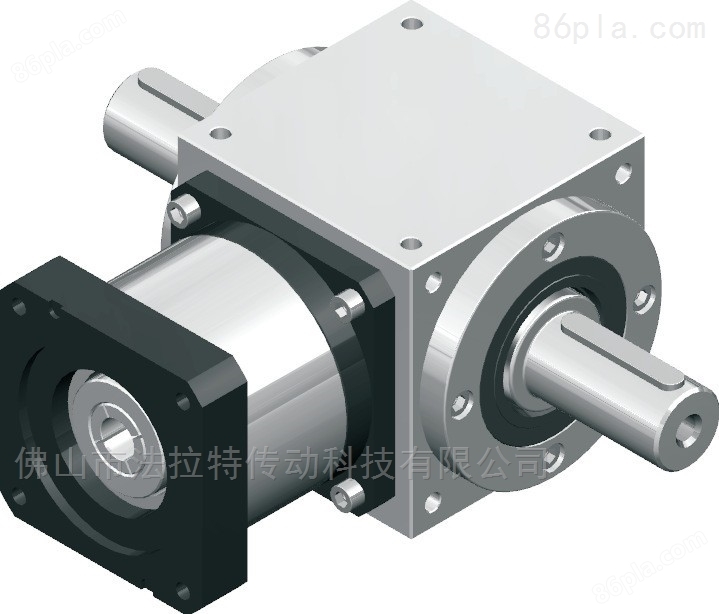 是1969年美国数字设备公司(DEC)研制的。限于当时的元器件条件及计算机发展水平,早期的PLC主要由分立元件和中小规模集成电路组成,
是1969年美国数字设备公司(DEC)研制的。限于当时的元器件条件及计算机发展水平,早期的PLC主要由分立元件和中小规模集成电路组成, 可以完成简单的逻辑控制及定时、计数功能。20世纪70年代初出现了微处理器。人们很快将其引入可编程控制器,使PLC增加了运算
可以完成简单的逻辑控制及定时、计数功能。20世纪70年代初出现了微处理器。人们很快将其引入可编程控制器,使PLC增加了运算 、数据传送及处理等功能,完成了真正具有计算机特征的工业控制装置。为了方便熟悉继电器、接触器系统的工程技术人员使用,
、数据传送及处理等功能,完成了真正具有计算机特征的工业控制装置。为了方便熟悉继电器、接触器系统的工程技术人员使用, 可编程控制器采用和继电器电路图类似的梯形图作为主要编程语言,并将参加运算及处理的计算机存储元件都以继电器命名。此时的PLC为微机技术和继电器常规控制概念相结合的产物。
可编程控制器采用和继电器电路图类似的梯形图作为主要编程语言,并将参加运算及处理的计算机存储元件都以继电器命名。此时的PLC为微机技术和继电器常规控制概念相结合的产物。
基恩士可编程控制器(或同等控制器) KV-24AR
 摘要:中国台湾原装法拉特FALATE
[详细]
摘要:中国台湾原装法拉特FALATE
[详细]
 摘要:原装中国台湾法拉特FALATE
[详细]
摘要:原装中国台湾法拉特FALATE
[详细]
 摘要:原装中国台湾法拉特FALATE
[详细]
摘要:原装中国台湾法拉特FALATE
[详细]
 摘要:原装中国台湾法拉特FALATE
[详细]
摘要:原装中国台湾法拉特FALATE
[详细]
 摘要:原装中国台湾法拉特FALATE
[详细]
摘要:原装中国台湾法拉特FALATE
[详细]
 摘要:原装中国台湾法拉特FALATE
[详细]
摘要:原装中国台湾法拉特FALATE
[详细]
 摘要:原装中国台湾法拉特FALATE
[详细]
摘要:原装中国台湾法拉特FALATE
[详细]
 摘要:原装中国台湾法拉特FALATE
[详细]
摘要:原装中国台湾法拉特FALATE
[详细]
吸塑模具 塑胶容器 塑料切粒机 脱模剂 再生料 lldpe 塑料颗粒搅拌机 塑料背心袋 特种塑料 夹布胶管 切粒机 abs价格 色母 油过滤器 编织硅胶管 硅胶管 油冷却器 除湿设备 橡胶磨具 橡胶模具 塑料容器 柔版印刷机 凸版印刷机 管材生产线 除湿干燥器 塑料吹膜机 硅胶管价格 塑料再生料 无纺布制袋机 泡沫造粒机 塑料磨粉机 拉丝机价格 炼胶机 背心袋制袋机 吸塑机价格 塑料吹瓶机 注塑机螺杆