供应
供应
产品详情


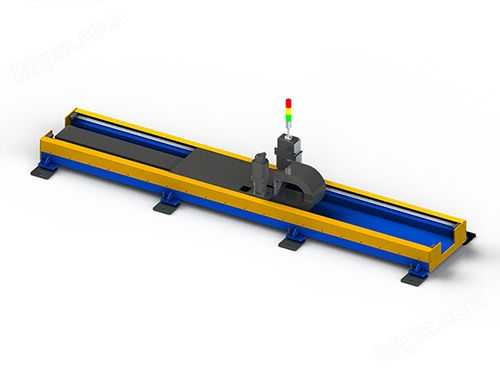
机器人地轨是焊接辅助设备,适用于回转工作的焊接变位,以获得理想的加工位置和焊接速度。可与操作机、焊机配套使用,组成自动焊接中心,也可用于手工作业时的工件变位。工作台回转采用变频器无级调速,调速。遥控盒可实现对工作台的远程操作,也可与操作机、焊接机控制系统相连,实现联动操作。
机器人地轨一般由工作台回转机构和翻转机构组成,通过工作台的升降,翻转和回转使固定在工作台上的工件达到所需的焊接,装配角度,工作台回转为变频无级调速,可有满意的焊接速度。
侧倾式变位机、头尾回转式变位机、头尾升降回转式变位机、头尾可倾斜式变位机以及双回转变位机等多种形式的变位器,通过工作台的升降、回转、翻转使工件处于焊接或装配位置,可与焊接操作机等配套组成自动焊接专机,还可作为机器人周边设备与机器人配套实现焊接自动化,同时可根据用户不同类型的工件及工艺要求,配以各种变位机。
机器人地轨按技术要求分:
1、回转驱动
(1)回转驱动应实现无级调速,并可逆转。
(2)在回转速度范围内,承受载荷时转速波动不超过5%。
2、倾斜驱动
(1)倾斜驱动应平稳,在负荷下不抖动,整机不得倾覆。负荷Q超过25kg的,应具有动力驱动功能。
(2)应设有限位装置,控制倾斜角度,并有角度指示标志。
(3)倾斜机构要具有自锁功能,在负荷下不滑动。
3、其他
(1)变位机控制部分应设有供自动焊用的联动接口。
(2)变位机应设有导电装置,以免焊接电流通过轴承、齿轮等传动部位。导电装置的电阻不应超过1mΩ,其容量应满足焊接额定电流的要求。
(3)电气设备应符合GB/T 4064的有关规定。
(4)工作台的结构应便于装卡工件或安装卡具,也可与用户协商确定其结构形式。
(5)负荷与偏心距及重心距之间的关系,应在变位机使用说明书中说明。
通常在设计电力驱动的变位机方案时,需要选择从电机到工作台之间的机械传动方式和相应的传动机构。在选择之前根据装配和焊接工艺过程的特点明确下列要求:
(1)对变位机械的功能要求:指变位机械应该能实现什么动作,如平移、升降或者回转等。如果是平移,是直线平移还是曲线平移;如果是回转运动,是连续回转还是间歇翻转等;
(2)对运动速度的要求:明确是还是慢速,是恒速还是变速,是有级变速还是无级变速;
(3)对传动平稳性和精度的要求:用于自动焊接的变位机,就要求传动具有较高的精度,这时就可以选择蜗杆传动和齿轮传动;
(4)对自锁、过载的保护,吸振等能力的要求:一般升降用的或翻转用的以及有倾覆危险的传动,传动机构有自锁能力。传动方式和其相应的传动机构可能有多个,这时就要从它们之间的传动功率大小、尺寸紧凑程度,传快慢低和制造成本来综合考虑后选定了。
分类:
①双立柱单回转式变位机:该种变位机适合装载机的后车架、压路机机架等工程机械长方形结构件的焊接,其主要特点是立柱一端电机驱动工作装置沿一个回转方向运转,另一端随主动端从动。两侧立柱可设计成可升降式,以适应不同规格产品。这种型式变位机的缺点只能在一个圆周方向回转,选择时要注意焊缝形式是否适合。
②U型双座式头尾双回转型式:与一种变位机型式相比,基础上被焊结构件在另外一个空间又增加一个旋转自由度。这种型式的变位机焊接空间大,工件可被旋转到需要的位置,设计,在二十一世纪初工程机械许多厂家成功使用。该变位机可根据各厂的工艺情况在装载机、挖掘机、压路机等结构件焊接时应用。
③L型双回转焊接变位机:该种变位机工作装置L型,有两个方面的回转自由度,且两个方向都可以±360°任意回转。此变位机与其它类型变位机相比,开敞性好,容易操作。L型变位机已在装载机前车架焊接中成功的使用,而且使用效果很好,深受现场操作工的欢迎。
④C型双回转焊接变位机:C型回转形式与L型机相同,只是为了方便夹具体的设计,根据结构件的外形,变位机的工作装置稍作变动。该种型式焊接变位机,适合装载机的铲斗、挖掘机的挖斗等焊接。
⑤座式通用变位机:座式焊接变位机工作台有一个整体翻转的自由度,可以将工作翻转至理想的焊接位置进行焊接。另外工作台还有一个旋转的自由度。该种变位机适合工程机械的小型焊接件及一些管类、轴类、盘类等中小型复杂结构的焊接。
主要作用:
通过改变焊件、焊机及焊接工人的操作位置,达到和保持焊接位置的较好状态;
有利于实现机械化和自动化生产。焊接变位机械的主要类型有焊件变位机、焊机变位机和焊工变位机等几种,每种类型又按其结构特点或作用分成若干种类。

 摘要:汽车座椅焊接夹具汽车座椅
[详细]
摘要:汽车座椅焊接夹具汽车座椅
[详细]
 摘要:汽车消声器焊接夹具汽车消
[详细]
摘要:汽车消声器焊接夹具汽车消
[详细]
 摘要:框架类焊接工装根据产品工
[详细]
摘要:框架类焊接工装根据产品工
[详细]
 摘要:电动车架焊接夹具电动车架
[详细]
摘要:电动车架焊接夹具电动车架
[详细]
 摘要:功能特征:CRP-CAW-V2是由
[详细]
摘要:功能特征:CRP-CAW-V2是由
[详细]
 摘要:激光焊缝跟踪仪的优点:-焊
[详细]
摘要:激光焊缝跟踪仪的优点:-焊
[详细]
 摘要:SCARA机器人CRP-RS06-06的
[详细]
摘要:SCARA机器人CRP-RS06-06的
[详细]
 摘要:SCARA机器人CRP-RS04-03的
[详细]
摘要:SCARA机器人CRP-RS04-03的
[详细]
吸塑模具 塑胶容器 塑料切粒机 脱模剂 再生料 lldpe 塑料颗粒搅拌机 塑料背心袋 特种塑料 夹布胶管 切粒机 abs价格 色母 油过滤器 编织硅胶管 硅胶管 油冷却器 除湿设备 橡胶磨具 橡胶模具 塑料容器 柔版印刷机 凸版印刷机 管材生产线 除湿干燥器 塑料吹膜机 硅胶管价格 塑料再生料 无纺布制袋机 泡沫造粒机 塑料磨粉机 拉丝机价格 炼胶机 背心袋制袋机 吸塑机价格 塑料吹瓶机 注塑机螺杆